

少数精鋭の技術者たちが、あらゆるシステム開発現場のお手伝いをします。
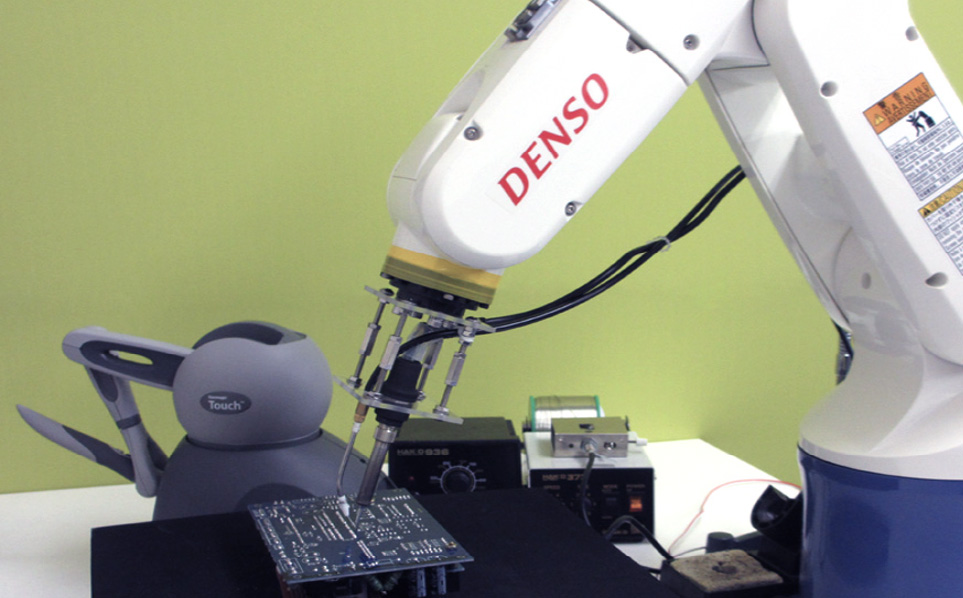
メディアロボテックでは、25年以上にわたるソフトウェア開発で培ったノウハウを元に、メディア技術(ICT+VR)とロボット技術(RT+AI+IoT)の融合をテーマとした各種システムの開発に積極的に取り組んでいます。
ADVANTAGE
-メディアロボテックの強み-
高い技術力を元にした提案力と、長年のエンドユーザー様との直接取引から培ったコミュニケーション・対応力にご期待ください。

最新情報
| 2023.11.06 | 腰痛予防スマートデバイスLBPP 紹介ページをアップしました |
| 2023.11.02 | 創立30周年のご挨拶 |
| 2023.10.18 | プライバシーマーク更新のお知らせ(2023年) |
| 2022.11.16 | 「Japan Robot Week2022」に出展しました |
| 2022.10.06 | 「Japan Robot Week2022」に共同出展します |
| 2022.03.31 | 会社紹介動画を公開しました |
| 2022.03.24 | 「2022国際ロボット展」に出展しました |
| 2022.01.18 | 「メカトロニクス」2月号に掲載されました |
| 2022.01.18 | 「HSR社会実装の実証実験」ページを公開しました |
| 2021.10.19 | 「さがみはらロボット大学校」出展記事を公開しました |
| 2021.10.19 | 「typeエンジニア転職フェア」に参加しました |
| 2021.09.15 | 「プライバシーマーク取得のお知らせ」を公開しました |
| 2020.03.13 | 「メカトロテックジャパン2019」出展記事を公開しました |
| 2020.02.04 | 世界最大級!「2019国際ロボット展」に出展しました |